

Physical activity:
Head:
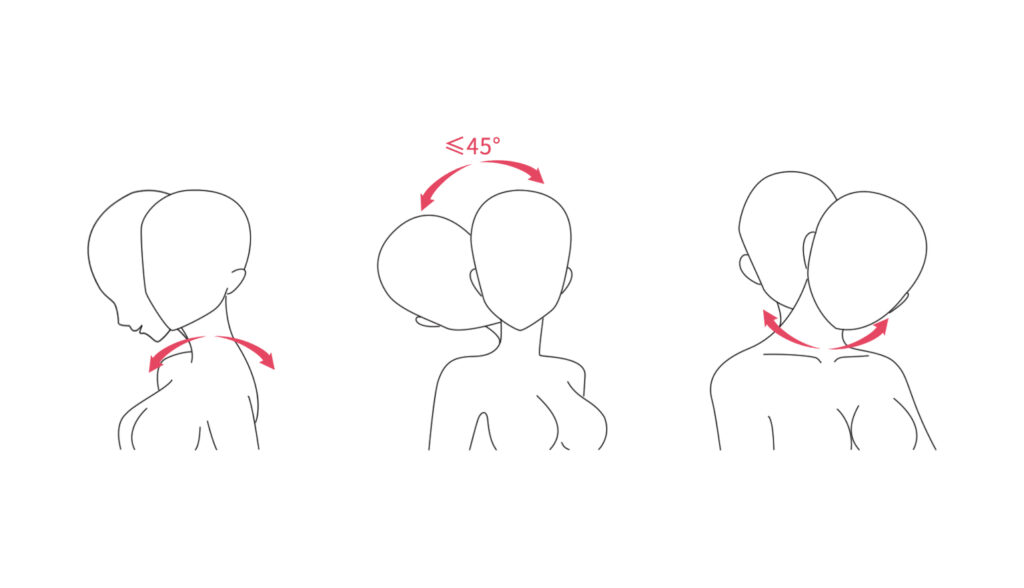
The head can be swung back and forth, left and right, and rotated from side to side, but not more than 45 degrees.
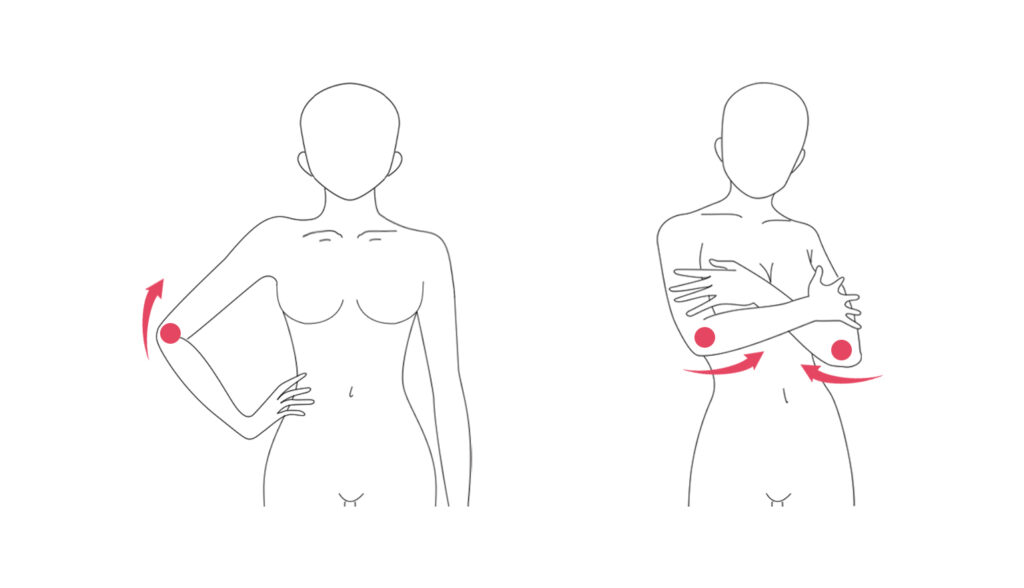
Arms:
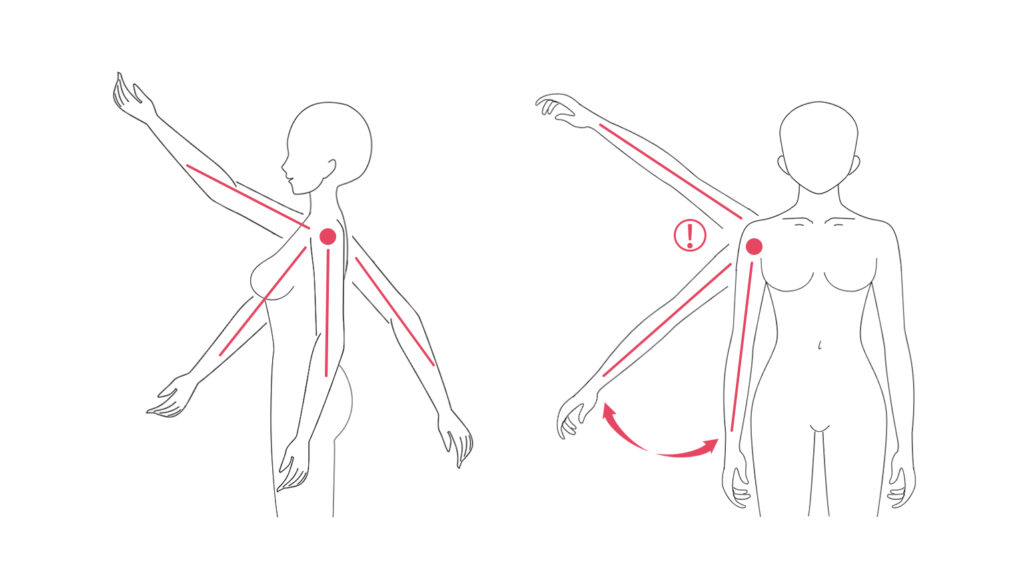
The arms can be raised to about 90 degrees horizontally towards the chest or to the sides of the body and bent backward by 10 degrees. It is possible to exceed this appropriately, but this is not recommended as overstretching may damage the armpit area.
Shoulders:
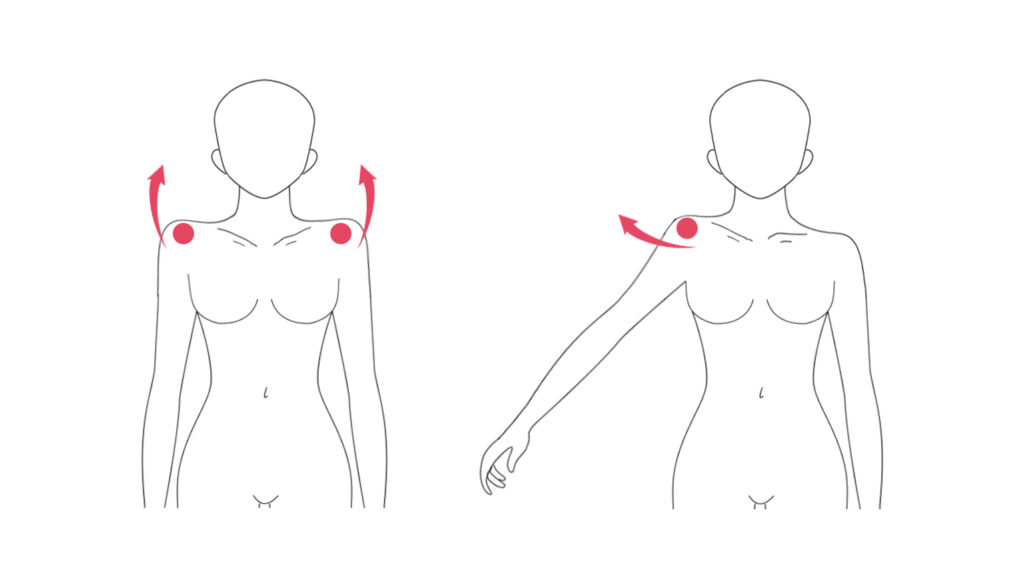
The EVO skeleton is suitable for allowing the doll to experiment with more realistic poses. The shoulders are allowed to move forward and backward by roughly 15 degrees or shrug upwards.
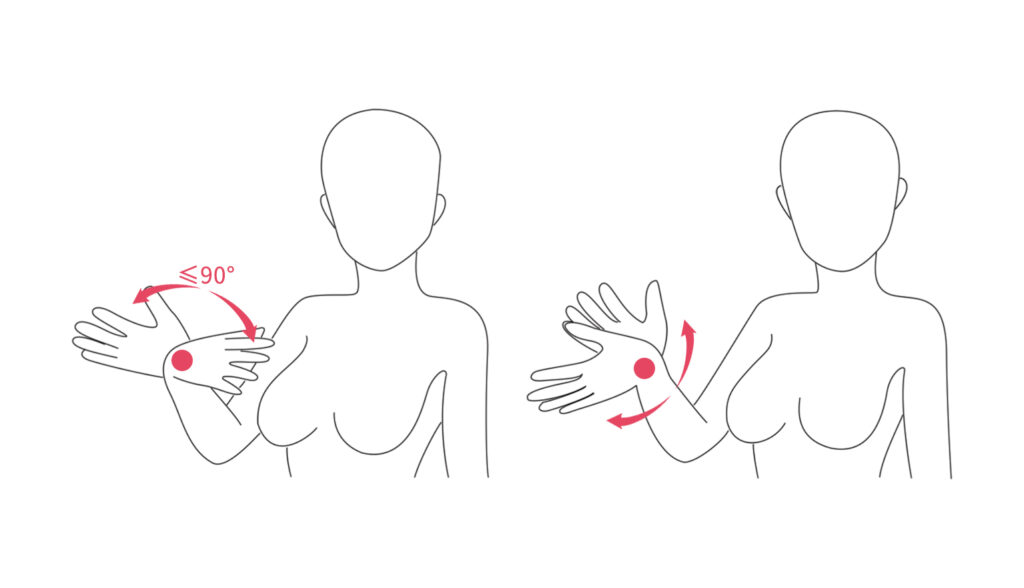
Forearms:
The forearms can be folded upwards by about 90 degrees and rotated left and right by 45 degrees.
Hands:
The wrists can be rotated 90 degrees each way. The palms of the hands, when in line with the arms, can swing 60 degrees up and down and 20 degrees left and right.
Fingers:
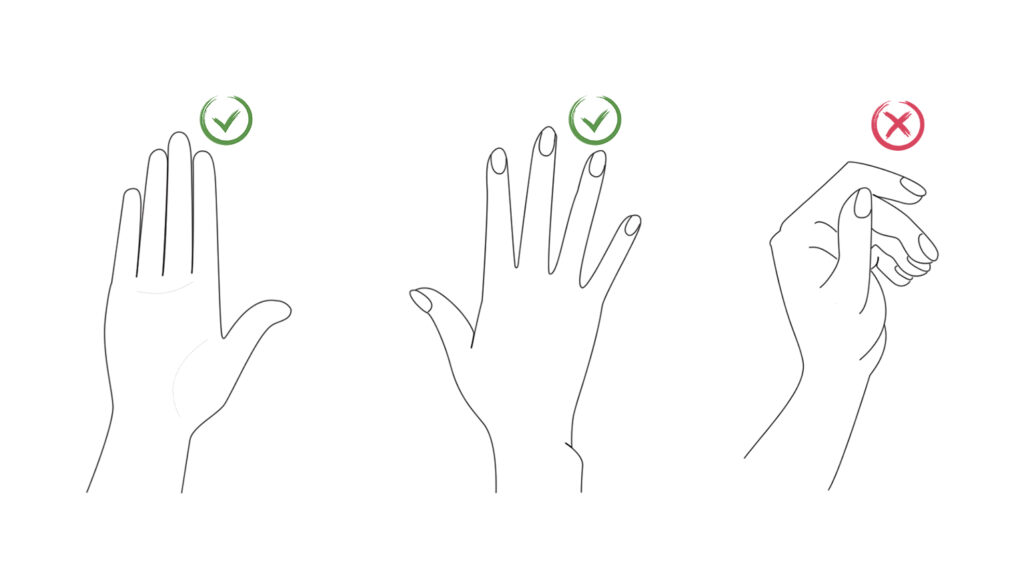
Each finger is supported by a wire. It is not recommended to bend the wires too often and the hands are not suitable for bearing excessively heavy objects.
Waist:
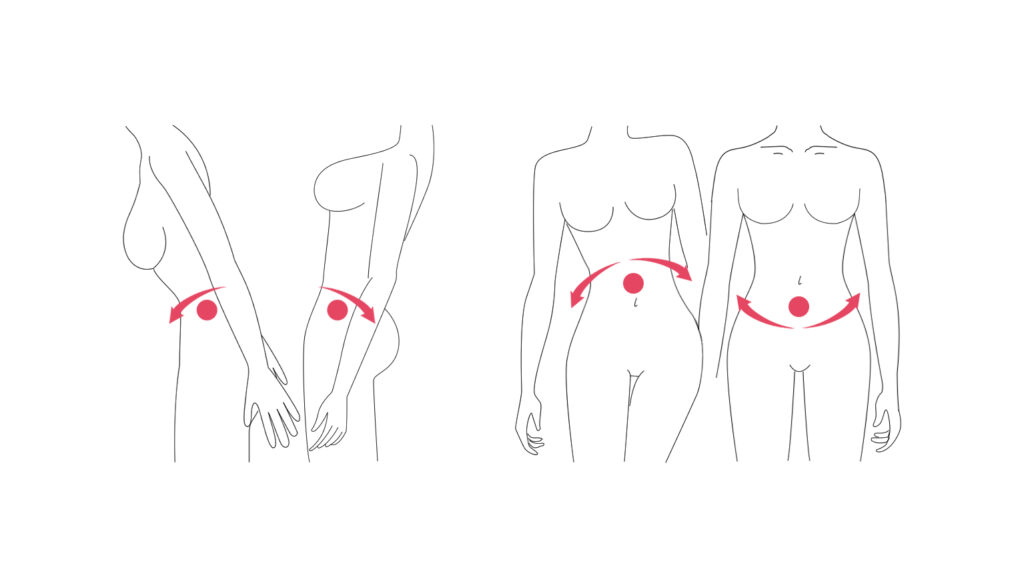
The waist can be folded back and forth and rotated left and right, with a limit of around 40 degrees. Please note that the angle limit is greatly reduced when the waist is bent and rotated at the same time. The doll’s waist can also be bent from side to side, in the horizontal direction, with an angle limit of 30 degrees.
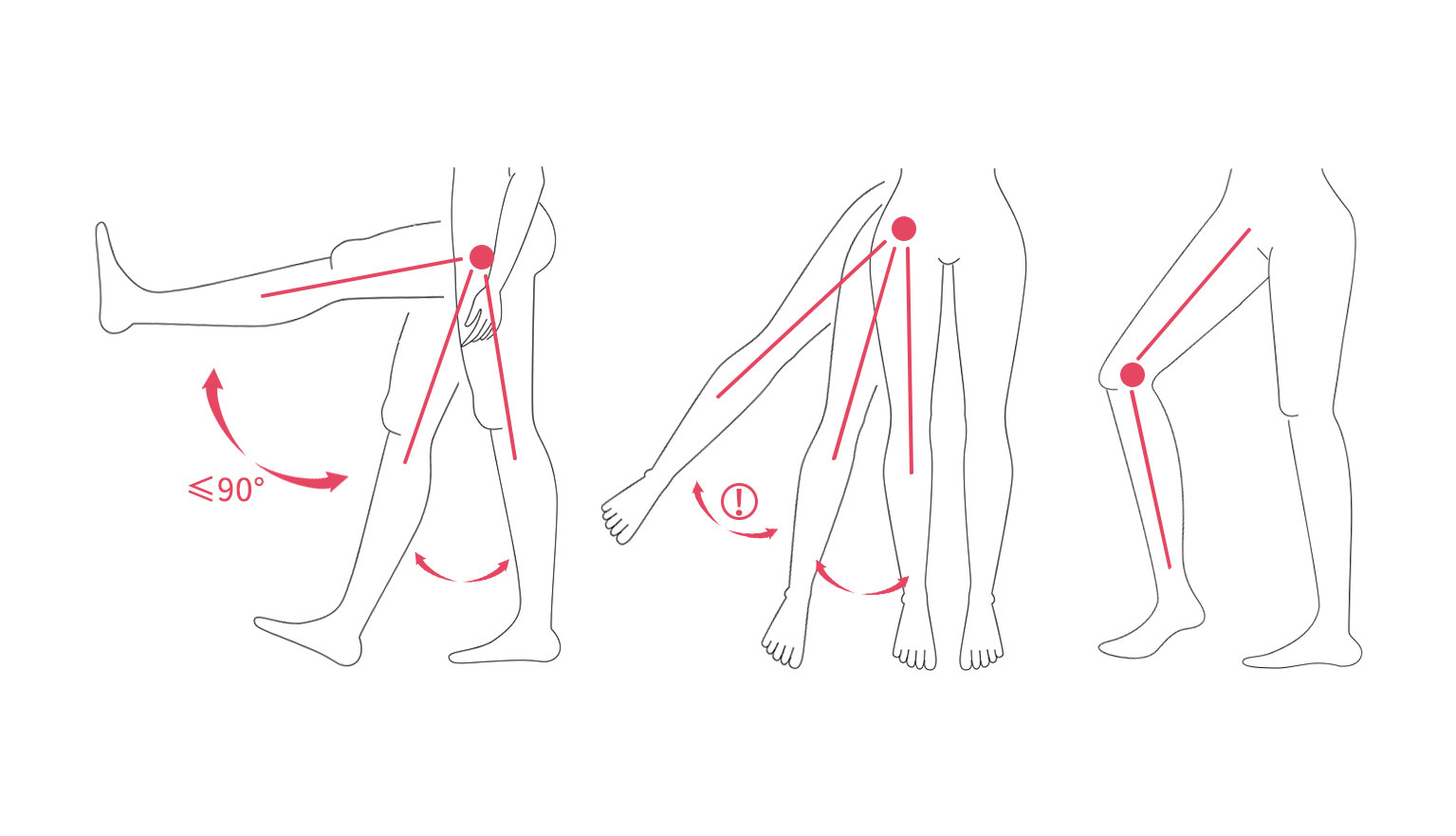
Thighs and Calves:
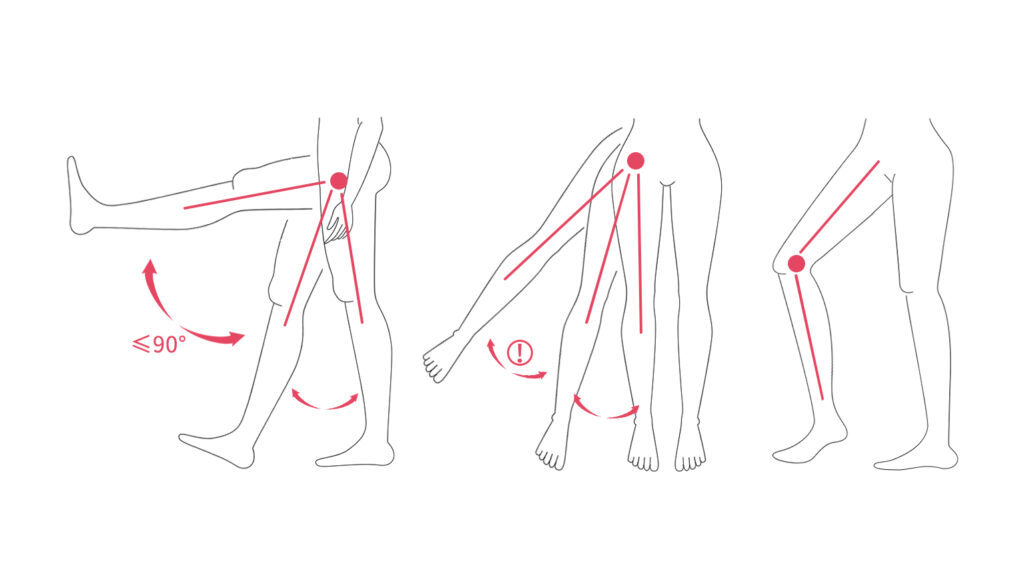
When lying flat or standing, the thighs may not be lifted more than 90 degrees, the calves may not be bent more than 90 degrees downwards and the calves may not be rotated more than 40 degrees from side to side. The thighs must not be spread more than 90 degrees to the left or right.
Foot:
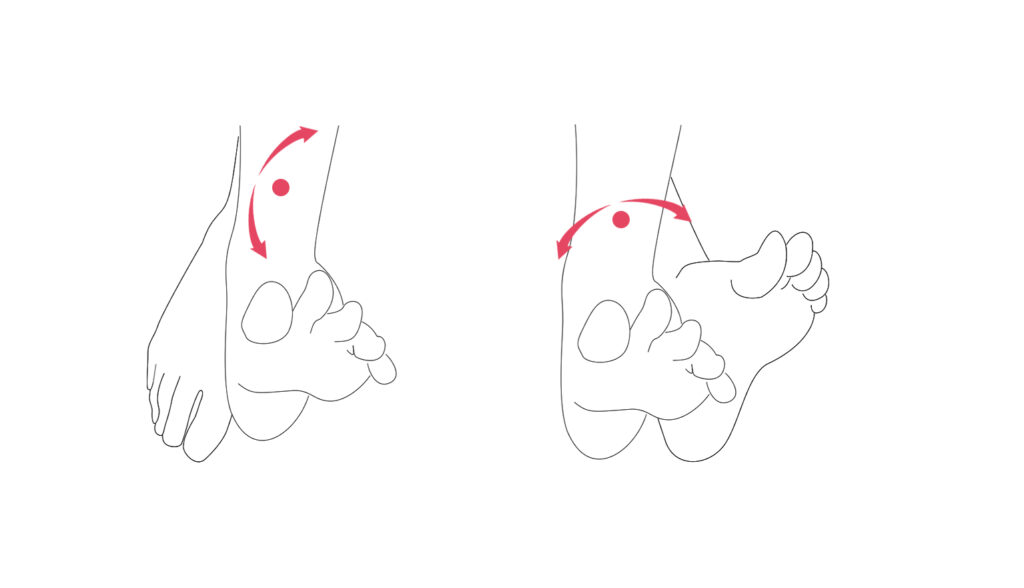
When the foot is at right angles to the calf, it may be lifted 20 degrees upwards, 45 degrees downwards and the ankle may be rotated 30 degrees from side to side.
Standing:
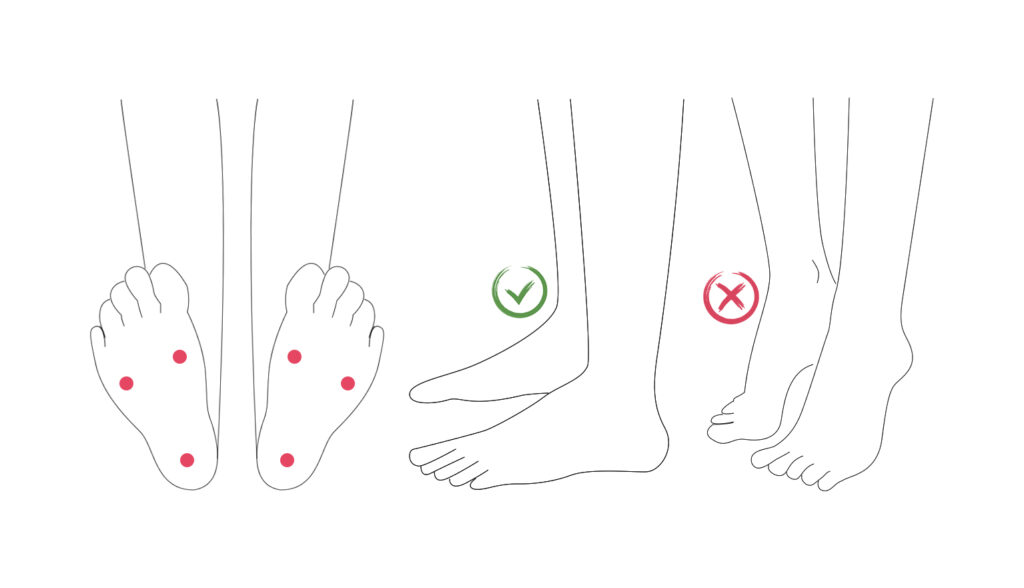
The standing option has three bolts on the bottom of the feet. When the doll tries to stand upright, the feet should be flat and the 6 bolts should touch the ground, preferably with shoes and socks.
